06 冲入AI无人区:无人驾驶之路
人工智能只有同人类命运紧密相连,直面复杂形势,才能体现出技术的革命性意义。昆德拉说:“负担越重,我们的生命越贴近大地,它就越真切实在。”无人车是紧贴大地的顶级人工智能工程,“艰难”和“颠覆”是它无法逃避的两个命题。它比人工智能诞生更早,却要翻过更多观念和技术的大山才能走到今天,车辙所及,是自交通工具诞生以来的社会秩序。
无人车也叫自动驾驶汽车,是指在没有人工参与的情况下,能够感知环境并进行导航的汽车。1925年第一辆无人车在美国上路时,发明者对它是否需要“智能”还未达成共识。但从此以后,无人车的形象出现在不同种类的科幻小说和电影里。这个梦想如此具体,可是历经几代人的实践仍然没有成真。不过值得庆幸的是,每一个逐梦者的挫折都让无人车的前进之路日渐清晰——这是一条智能进化之路,也是人类社会的变革之路。
在吸引人们踏上征程的未来世界,无人车不再只是通行工具,而是家和办公室之外的第三空间,移动、安全且舒适。人类以最低的成本穿梭在空间之中,以往由低效带来的堵车、污染、停车问题都将大为缓解,酒驾、闯红灯、超速等危及他人人身安全的驾驶行为将不复存在。无人车体系更有望成为全球物联网体系的血脉,甚至汽车作为一种交通工具的社会地位和符号意义也将发生彻底改变。
2015年世界卫生组织表示,中国每年有超过26万人死于交通事故,居世界第一,其中90%的事故是人为失误导致。无人车有望将车祸数量降低到现在的1%。
此外还有巨大的收益。摩根士丹利在一份报告中指出,无人车发展起来以后,仅美国就能够获得1.3万亿美元的收入,相当于美国GDP的8%。这其中有1000多亿美元来自节省下的燃料、2000多亿美元来自减少的堵车成本、5000多亿美元来自交通事故锐减而节省的医疗和保险成本、4000多亿美元来自工作效率的提高。
这些都还只是一个侧面。无人车改变的不单是人与车的关系。一旦车与车、人与人、人与社会都被智能工具连接,带来的将是对现有物质世界规则的重塑。
在崎岖的道路上前行
时间回到1925年8月,人类历史上第一辆无人驾驶汽车正式亮相。这辆名为American Wonder(美国奇迹)的汽车驾驶座上确实没有人,方向盘、离合器、制动器等部件也是“随机应变”的。而在车后,工程师Francis P. Houdina(弗朗西斯· P.霍迪尼)坐在另一辆车上靠发射无线电波操控前车。他们穿过纽约拥挤的交通,从百老汇一直开到第五大道。这场几乎可以被看作是“超大型遥控”的实验,带着对无人车机械化的理解,今天依旧不被业界普遍承认。
1939年,摩天大楼开始在美国的土地上不断出现。“大萧条”后逐渐恢复信心的人们怀揣着对未来的美好愿景。在这一年的纽约世界博览会上,通用汽车搭建的Futurama(未来世界)展馆前排起了长龙,人群争相涌入,希望一探“未来”的模样。设计师Norman Bel Geddes(诺曼·贝尔·格迪斯)向当时的人们展示了他想象中的交通:汽车采用无线电控制,电力驱动,由嵌在道路中的电磁场提供能量。
他在自己1940年出版的《Magic Motorways》(神奇的高速公路)一书中进一步解释:人类应该从驾驶中脱离出来。美国高速公路都会配有类似火车轨的东西,为汽车提供自动驾驶系统。汽车开上高速后就会按照一定的轨迹和程序行进,驶出高速后再恢复到人类驾驶。对这一设想,他给出的时间表是1960年。
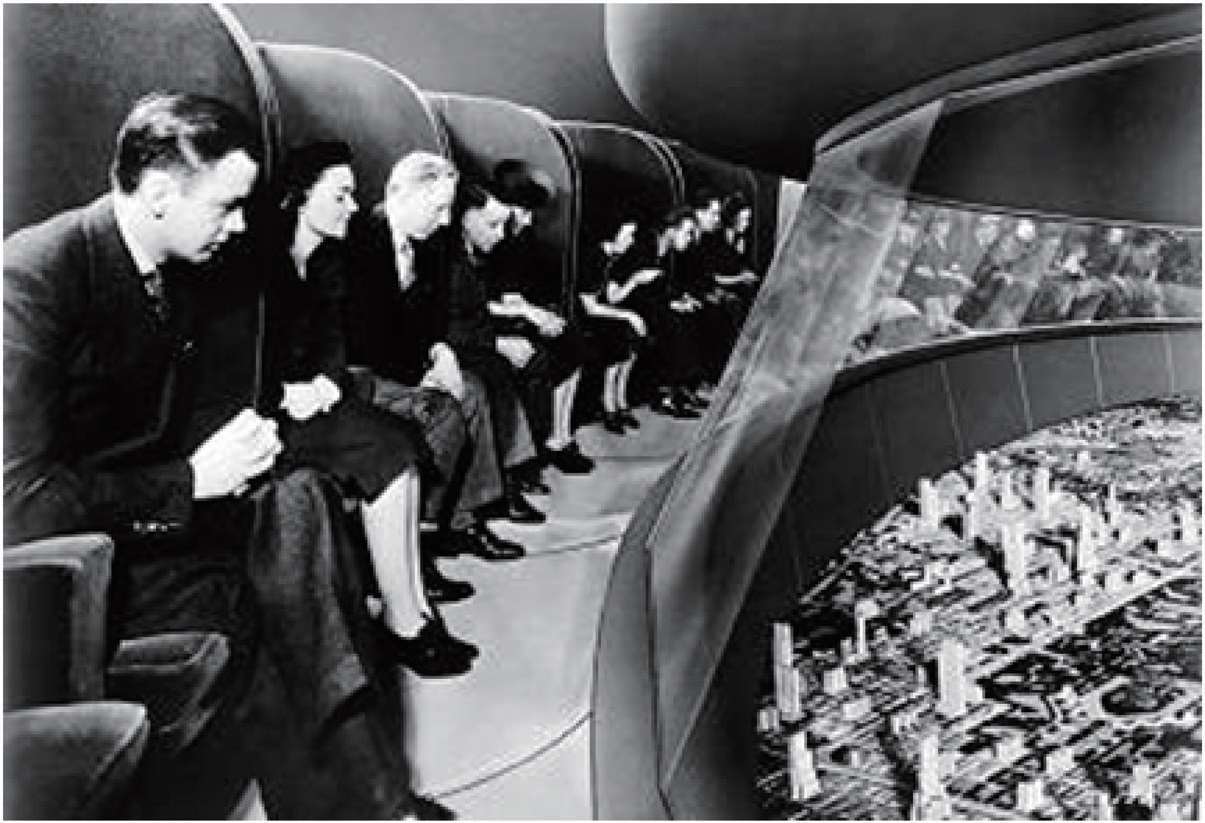
图6-1 1939年纽约世博会通用汽车搭建的Futurama场馆
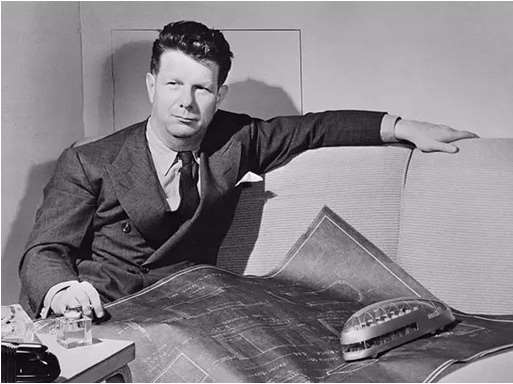
图6-2 Norman Bel Geddes(1893—1958年)最早提出了无人驾驶的概念
20世纪50年代,研究人员开始按照上述设想进行实验。或许是实验让人认清了困难,预言被延后了,他们说这一切会在1975年发生。
在这之后,试图利用铺设在地面上的电线为汽车导航,进而实现无人驾驶的技术探索在各处展开。而英国人把路上的电线改成永磁铁片组成的引导线,他们认为这样做能使控制更加精准,车速更快。“地面轨道派”经历了无数挫折,几乎所有人都隐隐感到,以轨道引导无人驾驶不具备实际应用价值,而且这已经是当时技术条件的“天花板”。不过,这种应用模式倒是在一些送餐机器人的产品中实现了。
1956年,通用公司造出了无人车的实体。它展出的Firebird II(火鸟二代)概念车,首次提出了安全及自动导航系统。钛金属、流线型的车身简直像是一枚直接从科幻电影中开出来的火箭。这只“火鸟”推出第三代时广告语是:“想要坐着放松一下?好,设定好想要的速度,然后调成自动导航状态吧。放开手柄,Firebird III会自己搞定。”

图6-3 Firebird III(火鸟三代)
通用公司还邀请BBC现场直播了高速公路上的无人驾驶测试,不过,这时的无人车依旧通过接收预埋线缆发送的电子脉冲信号行驶,没能挣脱“地面轨道派”的思路。
至此,不论是将“遥控器”掌握在人类手里,还是可行性不高的预铺电缆,都和人类想象中自由、流畅的无人驾驶体验相去甚远。直到20世纪60年代,俄亥俄州立大学的项目负责人Cosgriff(科斯格里夫)还深信,埋设在道路中的电子导航设备将在15年内推向公共道路。世界各国的实验室还要在这些“磨盘”的圆周上徘徊多年,唯一的区别是各自走出的半径大小。
曙光就在前方
当时,影响今天无人车的主流技术已经在各大研究机构中显露雏形。只不过在那时,这些技术零星分散在各处,也没有人想到要把它们组合起来。
1966年,智能导航第一次出现在美国斯坦福大学研究所里,SRI人工智能研究中心研发的Shakey是一个有车轮结构的机器人。它可能要花上数小时才能完成开关灯这样简单的动作,但在它身上,内置了传感器和软件系统,开创了自动导航功能的先河。
1977年,日本的筑波工程研究实验室开发出了第一个基于摄像头来检测前方标记或者导航信息的自动驾驶汽车。这辆车配备两个摄像头,在高架轨道的辅助下时速能达到30公里。这意味着,人们开始从“视觉”角度思考无人车的前景。导航与视觉一起,让“地面轨道派”寿终正寝。